認識電腦視覺
-
目前電腦視覺領域正處於從「感知」轉向「理解」的轉型期,在物件偵測 (Object Detection) 部份的技術已極為成熟,主流的 YOLO ( You Only Look Once ) 系列已進步到在可以在邊緣運算設備( 例如:Ameba ) 上展現極致的即時推論反應。
-
什麼是「物件偵測」?
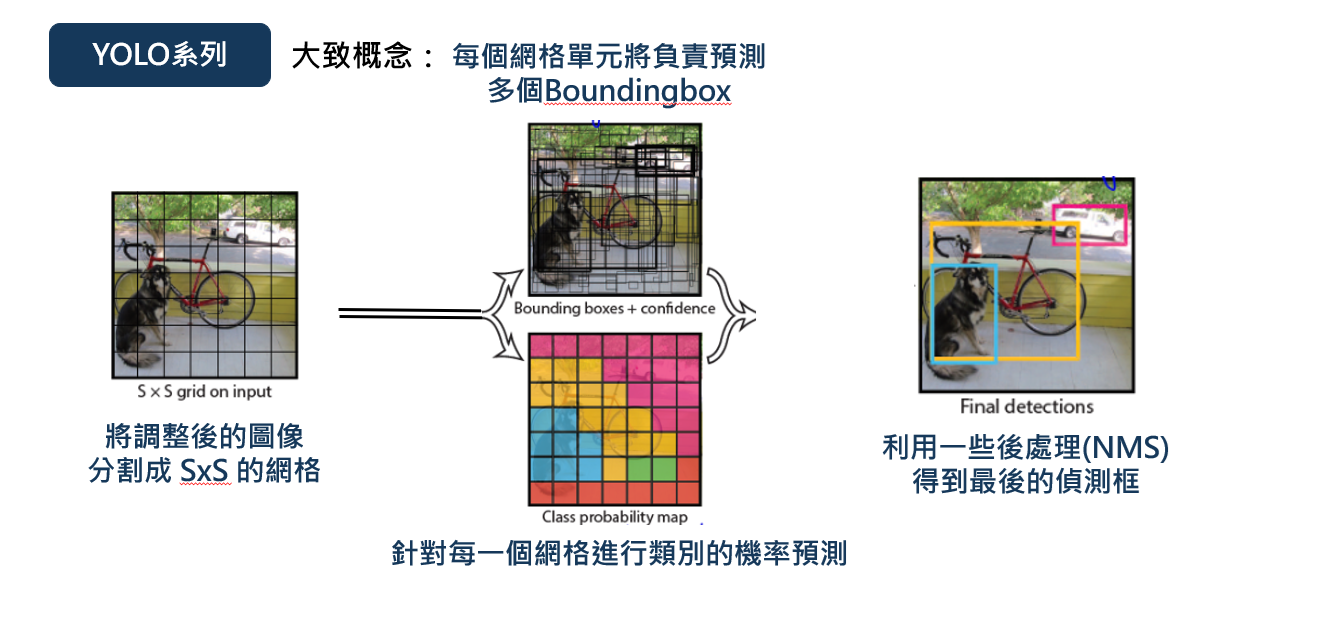
物件偵測就是在照片或影片等圖像內容中,用框 (anchor) 標出物件的範圍,並且分類為何種物件及附帶模型對此物件的信心程度。
目前最熱門最有名的物件偵測模型就是 YOLO
全名:You Only Look OnceYOLO 系列模型採用深度卷積神經網路(CNN),以端到端的方式進行物件偵測。它是目前最常見且應用很廣的物件偵測方法,例如:人流偵測、車牌辨識等。
優勢 : 速度快(適合即時)、易於訓練和部署、無遮擋or偵測大型物件的精確率高
劣勢 : 小物件偵測較差、複雜情況下精確率低
圖片來源:NTNU AIOTLab 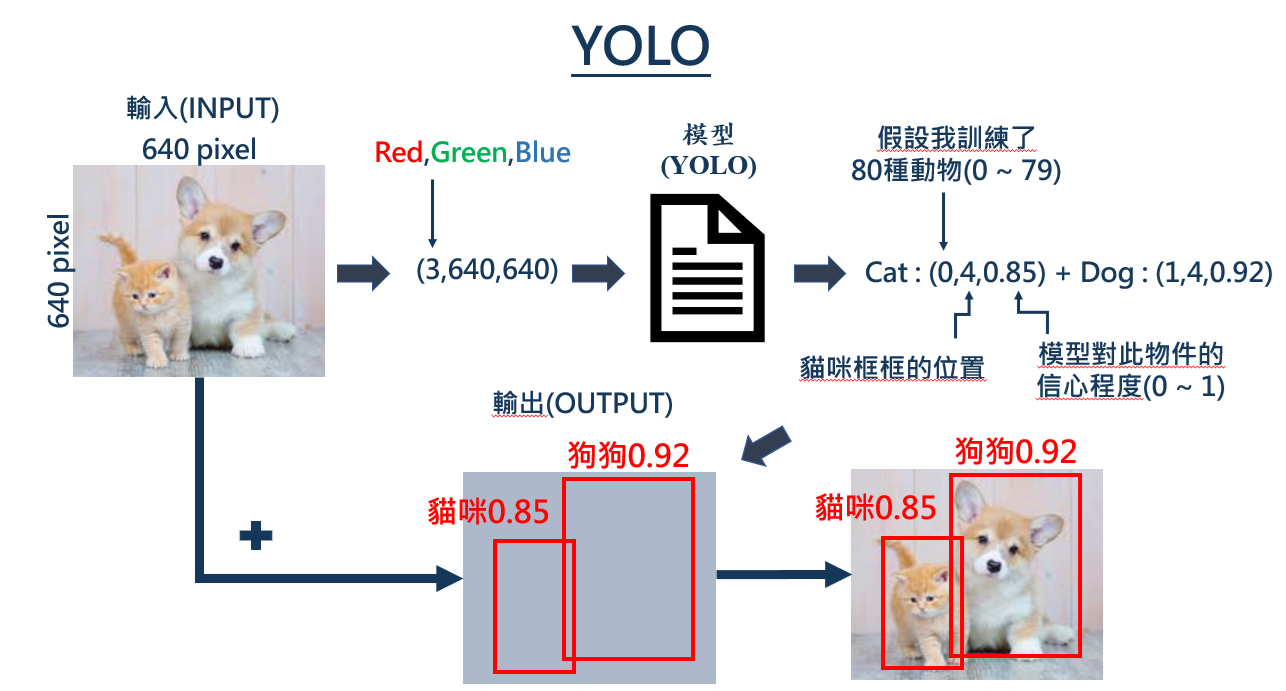
圖片來源:NTNU AIOTLab -
使用 Ameba 實作「物件偵測」
透過連接在 Ameba 開發板上的鏡頭,我們可以即時將拍到的畫面進行「物件偵測」辨識,因為 Ameba 本身自己就有 Wifi 天線,所以在「程式碼」中,需指定與想觀看鏡頭串流的電腦 VLC 應用程式的無線網路是使用同一個 AP 。
在Arduino IDE中,尋找以下路徑:
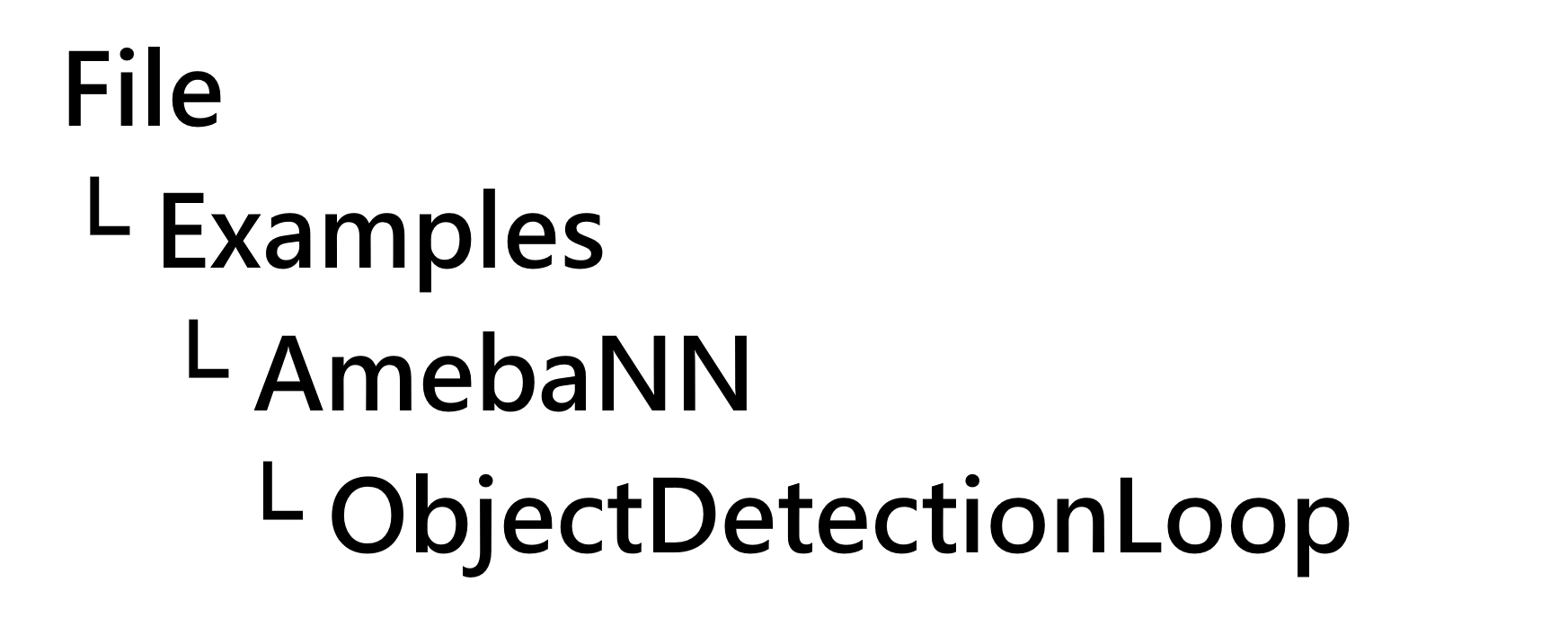
【程式碼】
/* Example guide: https://ameba-doc-arduino-sdk.readthedocs-hosted.com/en/latest/ameba_pro2/amb82-mini/Example_Guides/Neural%20Network/Object%20Detection.html NN Model Selection Select Neural Network(NN) task and models using modelSelect(nntask, objdetmodel, facedetmodel, facerecogmodel). Replace with NA_MODEL if they are not necessary for your selected NN Task. NN task ======= OBJECT_DETECTION/ FACE_DETECTION/ FACE_RECOGNITION Models ======= YOLOv3 model DEFAULT_YOLOV3TINY / CUSTOMIZED_YOLOV3TINY YOLOv4 model DEFAULT_YOLOV4TINY / CUSTOMIZED_YOLOV4TINY YOLOv7 model DEFAULT_YOLOV7TINY / CUSTOMIZED_YOLOV7TINY SCRFD model DEFAULT_SCRFD / CUSTOMIZED_SCRFD MobileFaceNet model DEFAULT_MOBILEFACENET/ CUSTOMIZED_MOBILEFACENET No model NA_MODEL */ #include "WiFi.h" #include "StreamIO.h" #include "VideoStream.h" #include "RTSP.h" #include "NNObjectDetection.h" #include "VideoStreamOverlay.h" #include "ObjectClassList.h" #define CHANNEL 0 #define CHANNELNN 3 // Lower resolution for NN processing #define NNWIDTH 576 #define NNHEIGHT 320 VideoSetting config(VIDEO_FHD, 30, VIDEO_H264, 0); VideoSetting configNN(NNWIDTH, NNHEIGHT, 10, VIDEO_RGB, 0); NNObjectDetection ObjDet; RTSP rtsp; StreamIO videoStreamer(1, 1); StreamIO videoStreamerNN(1, 1); char ssid[] = "Network_SSID"; // your network SSID (name) char pass[] = "Password"; // your network password int status = WL_IDLE_STATUS; IPAddress ip; int rtsp_portnum; void setup() { Serial.begin(115200); // attempt to connect to Wifi network: while (status != WL_CONNECTED) { Serial.print("Attempting to connect to WPA SSID: "); Serial.println(ssid); status = WiFi.begin(ssid, pass); // wait 2 seconds for connection: delay(2000); } ip = WiFi.localIP(); // Configure camera video channels with video format information // Adjust the bitrate based on your WiFi network quality config.setBitrate(2 * 1024 * 1024); // Recommend to use 2Mbps for RTSP streaming to prevent network congestion Camera.configVideoChannel(CHANNEL, config); Camera.configVideoChannel(CHANNELNN, configNN); Camera.videoInit(); // Configure RTSP with corresponding video format information rtsp.configVideo(config); rtsp.begin(); rtsp_portnum = rtsp.getPort(); // Configure object detection with corresponding video format information // Select Neural Network(NN) task and models ObjDet.configVideo(configNN); ObjDet.modelSelect(OBJECT_DETECTION, DEFAULT_YOLOV4TINY, NA_MODEL, NA_MODEL); ObjDet.begin(); // Configure StreamIO object to stream data from video channel to RTSP videoStreamer.registerInput(Camera.getStream(CHANNEL)); videoStreamer.registerOutput(rtsp); if (videoStreamer.begin() != 0) { Serial.println("StreamIO link start failed"); } // Start data stream from video channel Camera.channelBegin(CHANNEL); // Configure StreamIO object to stream data from RGB video channel to object detection videoStreamerNN.registerInput(Camera.getStream(CHANNELNN)); videoStreamerNN.setStackSize(); videoStreamerNN.setTaskPriority(); videoStreamerNN.registerOutput(ObjDet); if (videoStreamerNN.begin() != 0) { Serial.println("StreamIO link start failed"); } // Start video channel for NN Camera.channelBegin(CHANNELNN); // Start OSD drawing on RTSP video channel OSD.configVideo(CHANNEL, config); OSD.begin(); } void loop() { std::vector<ObjectDetectionResult> results = ObjDet.getResult(); uint16_t im_h = config.height(); uint16_t im_w = config.width(); Serial.print("Network URL for RTSP Streaming: "); Serial.print("rtsp://"); Serial.print(ip); Serial.print(":"); Serial.println(rtsp_portnum); Serial.println(" "); printf("Total number of objects detected = %d\r\n", ObjDet.getResultCount()); OSD.createBitmap(CHANNEL); if (ObjDet.getResultCount() > 0) { for (int i = 0; i < ObjDet.getResultCount(); i++) { int obj_type = results[i].type(); if (itemList[obj_type].filter) { // check if item should be ignored ObjectDetectionResult item = results[i]; // Result coordinates are floats ranging from 0.00 to 1.00 // Multiply with RTSP resolution to get coordinates in pixels int xmin = (int)(item.xMin() * im_w); int xmax = (int)(item.xMax() * im_w); int ymin = (int)(item.yMin() * im_h); int ymax = (int)(item.yMax() * im_h); // Draw boundary box printf("Item %d %s:\t%d %d %d %d\n\r", i, itemList[obj_type].objectName, xmin, xmax, ymin, ymax); OSD.drawRect(CHANNEL, xmin, ymin, xmax, ymax, 3, OSD_COLOR_WHITE); // Print identification text char text_str[20]; snprintf(text_str, sizeof(text_str), "%s %d", itemList[obj_type].objectName, item.score()); OSD.drawText(CHANNEL, xmin, ymin - OSD.getTextHeight(CHANNEL), text_str, OSD_COLOR_CYAN); } } } OSD.update(CHANNEL); // delay to wait for new results delay(100); }將以下兩行改成你的無線網路環境。
char ssid[] = "Network_SSID"; // your network SSID (name) char pass[] = "Password"; // your network password燒錄程式後,點選右上角的放大鏡圖示,打開 Serial Monitor ,找到 Ameba 的 IP address 。

圖片來源:NTNU AIOTLab 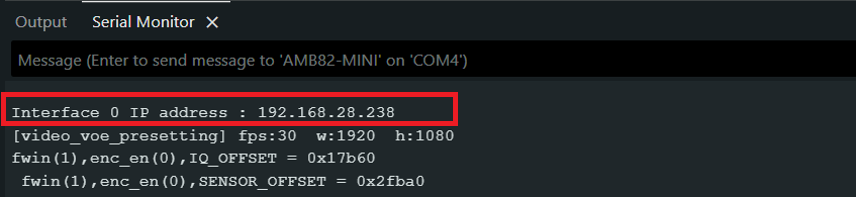
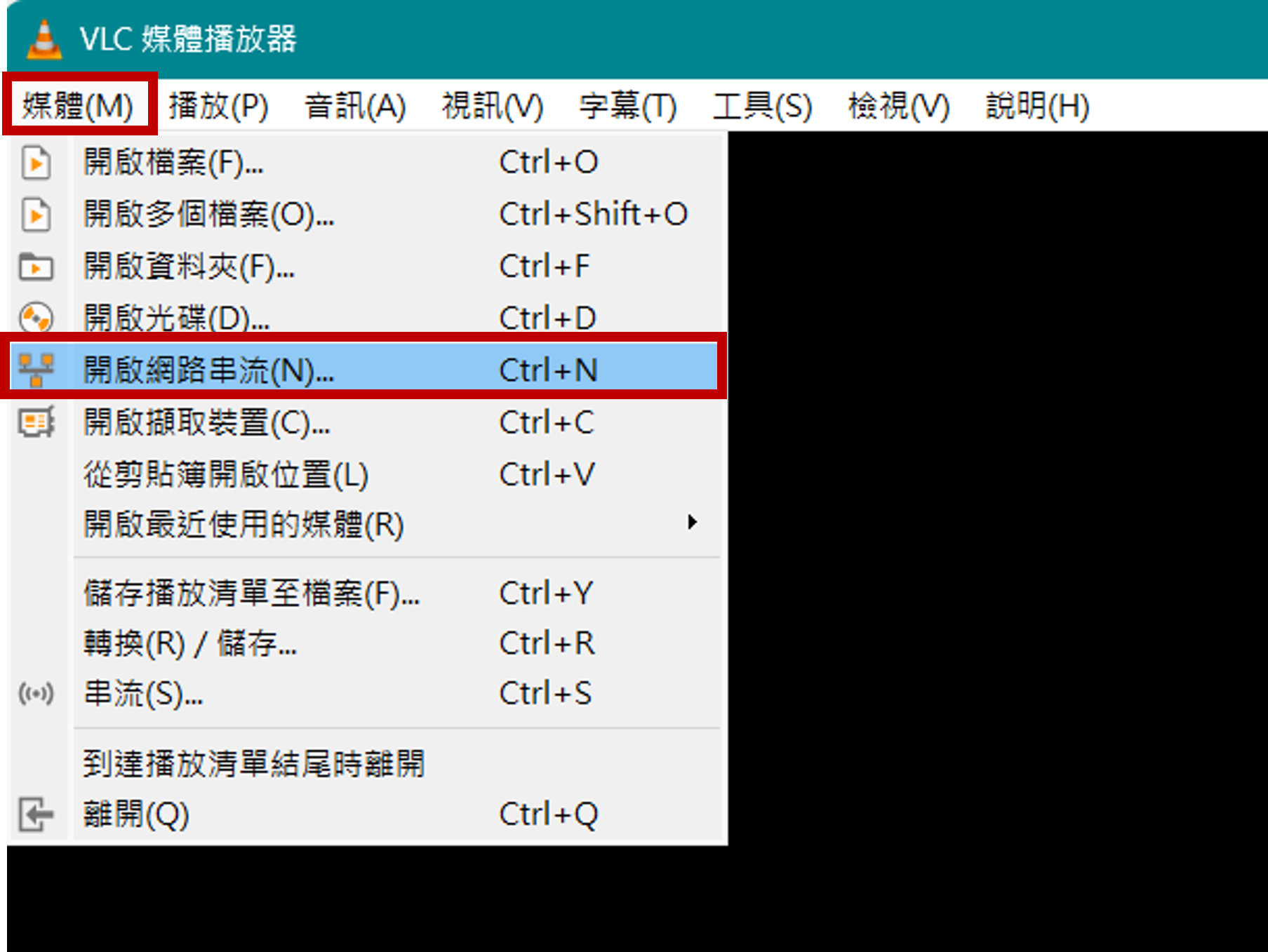
圖片來源:NTNU AIOTLab 打開 VLC Media Player 的 媒體/開啟網路串流,輸入rtsp://你的IP Address:554
圖片來源:NTNU AIOTLab 
圖片來源:NTNU AIOTLab 預先訓練模型總共可以識別 80 種不同類型的物件
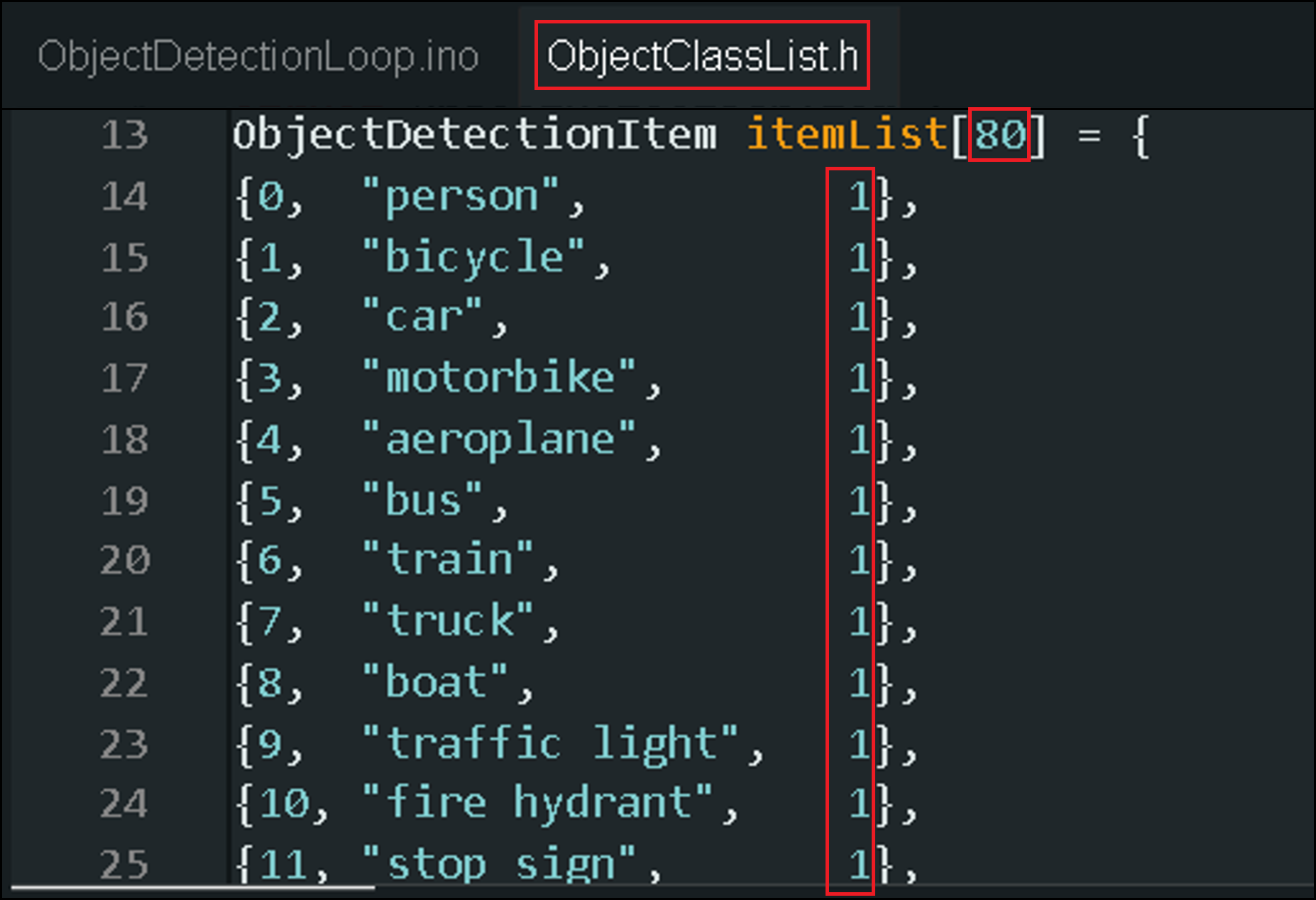
圖片來源:NTNU AIOTLab 要停用某些物件的識別,請將filter設置為 0
-
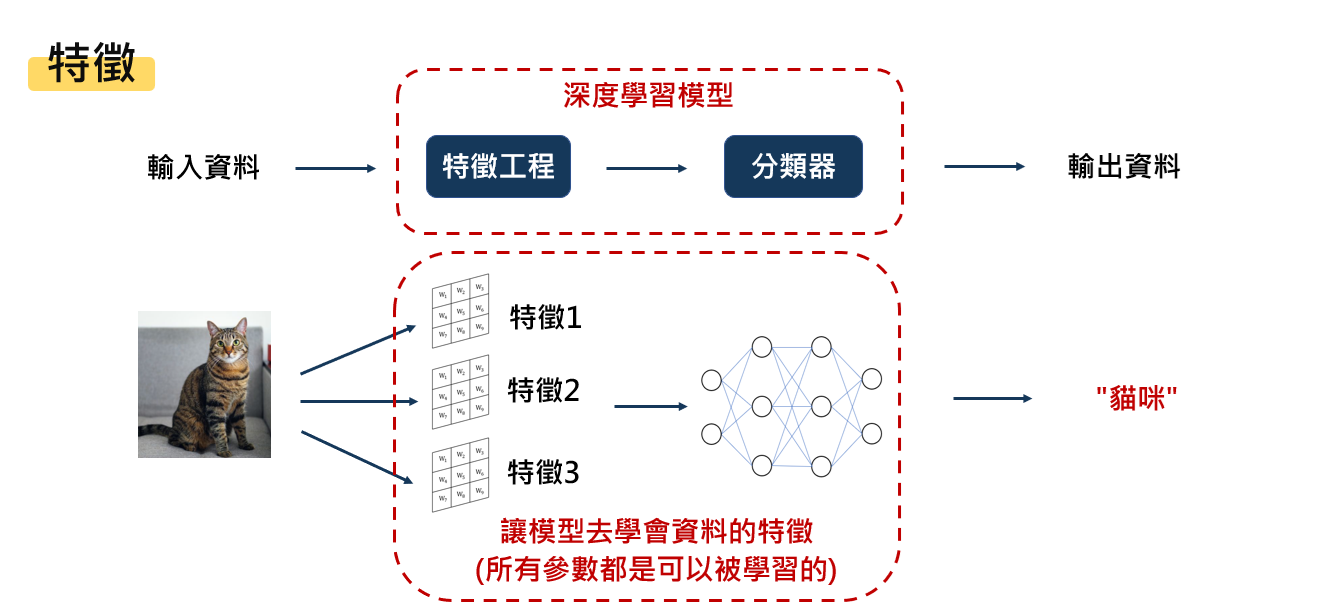
什麼是「圖片分類」?
給定一張圖片,模型的任務是判斷該圖片中的主要物體屬於哪個預先定義好的類別。例如,在貓狗分類中,模型需要判斷輸入圖片中的是貓還是狗。
圖片來源:NTNU AIOTLab -
使用 Ameba 實作「圖片分類」
透過連接在 Ameba 開發板上的鏡頭,我們可以即時將拍到的畫面進行「圖片分類」辨識,因為 Ameba 本身自己就有 Wifi 天線,所以在「程式碼」中,需指定與想觀看鏡頭串流的電腦 VLC 應用程式的無線網路是使用同一個 AP 。
在Arduino IDE中,尋找以下路徑:
【程式碼】
/* Example guide: https://ameba-doc-arduino-sdk.readthedocs-hosted.com/en/latest/ameba_pro2/amb82-mini/Example_Guides/Neural%20Network/Image%20Classification.html NN Model Selection Select Neural Network(NN) task and models using .modelSelect(nntask, objdetmodel, facedetmodel, facerecogmodel, audclassmodel, imgclassmodel). Replace with NA_MODEL if they are not necessary for your selected NN Task. NN task ======= OBJECT_DETECTION/ FACE_DETECTION/ FACE_RECOGNITION/ AUDIO CLASSIFICATION/ IMAGE CLASSIFICATION Models ======= YOLOv3 model DEFAULT_YOLOV3TINY / CUSTOMIZED_YOLOV3TINY YOLOv4 model DEFAULT_YOLOV4TINY / CUSTOMIZED_YOLOV4TINY YOLOv7 model DEFAULT_YOLOV7TINY / CUSTOMIZED_YOLOV7TINY SCRFD model DEFAULT_SCRFD / CUSTOMIZED_SCRFD MobileFaceNet model DEFAULT_MOBILEFACENET/ CUSTOMIZED_MOBILEFACENET YAMNET model DEFAULT_YAMNET / CUSTOMIZED_YAMNET Custom CNN model DEFAULT_IMGCLASS / CUSTOMIZED_IMGCLASS MobileNetV2 model DEFAULT_IMGCLASS_MOBILENETV2 / CUSTOMIZED_IMGCLASS_MOBILENETV2 No model NA_MODEL */ #include "WiFi.h" #include "StreamIO.h" #include "VideoStream.h" #include "RTSP.h" #include "NNImageClassification.h" #include "VideoStreamOverlay.h" #include "ClassificationClassList.h" // Enable only the model comes with metadata embedded, else ClassList need to be updated #define USE_MODEL_META_DATA_EN 1 // Color of images used to train the cnn model (RGB or Grayscale) #define IMAGERGB 0 #define CHANNEL 0 #define CHANNELNN 3 // Lower resolution for NN processing // Modify according to the model's input shape size #define NNWIDTH 224 #define NNHEIGHT 224 VideoSetting config(VIDEO_FHD, 30, VIDEO_H264, 0); VideoSetting configNN(NNWIDTH, NNHEIGHT, 10, VIDEO_RGB, 0); NNImageClassification imgclass; RTSP rtsp; StreamIO videoStreamer(1, 1); StreamIO videoStreamerNN(1, 1); char ssid[] = "Network_SSID"; // your network SSID (name) char pass[] = "Password"; // your network password int status = WL_IDLE_STATUS; IPAddress ip; int rtsp_portnum; void setup() { Serial.begin(115200); // attempt to connect to Wifi network: while (status != WL_CONNECTED) { Serial.print("Attempting to connect to WPA SSID: "); Serial.println(ssid); status = WiFi.begin(ssid, pass); // wait 2 seconds for connection: delay(2000); } ip = WiFi.localIP(); // Configure camera video channels with video format information // Adjust the bitrate based on your WiFi network quality config.setBitrate(2 * 1024 * 1024); // Recommend to use 2Mbps for RTSP streaming to prevent network congestion Camera.configVideoChannel(CHANNEL, config); Camera.configVideoChannel(CHANNELNN, configNN); Camera.videoInit(); // Configure RTSP with corresponding video format information rtsp.configVideo(config); rtsp.begin(); rtsp_portnum = rtsp.getPort(); // Configure object detection with corresponding video format information // Select Neural Network(NN) task and models imgclass.configVideo(configNN); imgclass.configInputImageColor(IMAGERGB); // only valid use for custom CNN model (e.g sequential) imgclass.useModelMetaData(USE_MODEL_META_DATA_EN); imgclass.setResultCallback(ICPostProcess_MobileNetV2); // MobileNetV2 model callback function: ICPostProcess_MobileNetV2, custom CNN model (e.g sequential) callback function: ICPostProcess imgclass.modelSelect(IMAGE_CLASSIFICATION, NA_MODEL, NA_MODEL, NA_MODEL, NA_MODEL, DEFAULT_IMGCLASS_MOBILENETV2); // if using MobileNetV2 model: DEFAULT_IMGCLASS_MOBILENETV2/CUSTOMIZED_IMGCLASS_MOBILENETV2, custom CNN model (e.g sequential): DEFAULT_IMGCLASS/CUSTOMIZED_IMGCLASS imgclass.begin(); // Configure StreamIO object to stream data from video channel to RTSP videoStreamer.registerInput(Camera.getStream(CHANNEL)); videoStreamer.registerOutput(rtsp); if (videoStreamer.begin() != 0) { Serial.println("StreamIO link start failed"); } // Start data stream from video channel Camera.channelBegin(CHANNEL); // Configure StreamIO object to stream data from RGB video channel to object detection videoStreamerNN.registerInput(Camera.getStream(CHANNELNN)); videoStreamerNN.setStackSize(); videoStreamerNN.setTaskPriority(); videoStreamerNN.registerOutput(imgclass); if (videoStreamerNN.begin() != 0) { Serial.println("StreamIO link start failed"); } // Start data stream from video channel Camera.channelBegin(CHANNELNN); // Start OSD drawing on RTSP video channel OSD.configVideo(CHANNEL, config); OSD.begin(); } void loop() { // Do nothing } // User callback function for MobileNetV2 model void ICPostProcess_MobileNetV2(std::vector<ImageClassificationResult> results) { OSD.createBitmap(CHANNEL); for (int i = 0; i < imgclass.getResultCount(); i++) { ImageClassificationResult imgclass_item = results[i]; int class_id = (int)imgclass_item.classID(); int prob = 0; if (imgclassMobileNetV2ItemList[class_id].filter) { char text_str[40]; prob = imgclass_item.score(); if (USE_MODEL_META_DATA_EN) { snprintf(text_str, sizeof(text_str), "class:%s %d", imgclass.getClassNameFromMeta(imgclass.model_meta_data, class_id, (int)(prob)), (int)(prob)); } else { snprintf(text_str, sizeof(text_str), "class:%s %d", imgclassMobileNetV2ItemList[class_id].imgclassName, imgclass_item.score()); printf("class:%s %d\r\n", imgclassMobileNetV2ItemList[class_id].imgclassName, imgclass_item.score()); } OSD.drawText(CHANNEL, 20, 20, text_str, OSD_COLOR_CYAN); } } OSD.update(CHANNEL); } // User callback function for custom CNN (e.g sequential) void ICPostProcess(std::vector<ImageClassificationResult> results) { if (imgclass.getResultCount() > 0) { // uncomment if you would like to see all the probabilities for all classes // printf("---- probabilities for all classes ----\r\n"); // for (int i = 0; i < imgclass.getResultCount(); i++) { // ImageClassificationResult imgclass_item = results[i]; // int class_id = (int)imgclass_item.classID(); // if (imgclassItemList[class_id].filter) { // printf("class:%s %d\r\n", imgclassItemList[class_id].imgclassName, imgclass_item.score()); // } // } OSD.createBitmap(CHANNEL); char text_str[40]; ImageClassificationResult top_imgclass_item = results[0]; int top_class_id = (int)top_imgclass_item.classID(); if (imgclassItemList[top_class_id].filter) { snprintf(text_str, sizeof(text_str), "class:%s %d", imgclassItemList[top_class_id].imgclassName, top_imgclass_item.score()); printf("top class detected: %s %d\r\n", imgclassItemList[top_class_id].imgclassName, top_imgclass_item.score()); } OSD.drawText(CHANNEL, 20, 20, text_str, OSD_COLOR_CYAN); OSD.update(CHANNEL); } }將以下兩行改成你的無線網路環境。
char ssid[] = "Network_SSID"; // your network SSID (name) char pass[] = "Password"; // your network password燒錄程式後,點選右上角的放大鏡圖示,打開 Serial Monitor ,找到 Ameba 的 IP address 。
圖片來源:NTNU AIOTLab 圖片來源:NTNU AIOTLab 打開 VLC Media Player 的 媒體/開啟網路串流,輸入rtsp://你的IP Address:554
圖片來源:NTNU AIOTLab 圖片來源:NTNU AIOTLab
-
什麼是「物件偵測」?